# Partie XII
## **À quoi sert un convertisseur analogique-numérique (ADC) ?**
**Le Raspberry Pi**, contrairement à un Arduino, **n’a pas d’entrée analogique**. Il ne peut lire que **des valeurs numériques** (0 ou 1, HIGH ou LOW). Or, certains capteurs, comme **la sonde d’humidité du sol Gravity SEN0193**, peuvent envoyer **une tension variable** représentant un niveau d’humidité, et non un simple “sec” ou “humide”.
👉 C’est là qu’intervient **le convertisseur analogique-numérique (ADC)**, comme le **MCP3008**.
### Pourquoi préférer une lecture analogique pour la sonde SEN0193 ?
[](https://doc.arles-linux.org//uploads/images/gallery/2025-08/vn2tk31LLmQER9KQ-mcp3008-ip-convertisseur-analogique-numerique.jpg)La sonde Gravity SEN0193, selon le modèle peut fonctionner en deux modes :
- **Numérique** : elle renvoie simplement 1 (sol sec) ou 0 (sol humide). C’est tout.
- **Analogique** : elle renvoie une **valeur continue** entre 0 et 3.3V, que le MCP3008 convertit en une valeur entre **0 et 1023**.
#### Avantages de l’analogique :
- Permet un **suivi plus fin et progressif de l’humidité** (utile pour déclencher l’arrosage à un seuil précis).
- Donne la **possibilité de créer des graphiques, des seuils personnalisés**, des alertes…
- Ouvre la voie à une gestion **intelligente et économe de l’eau**.
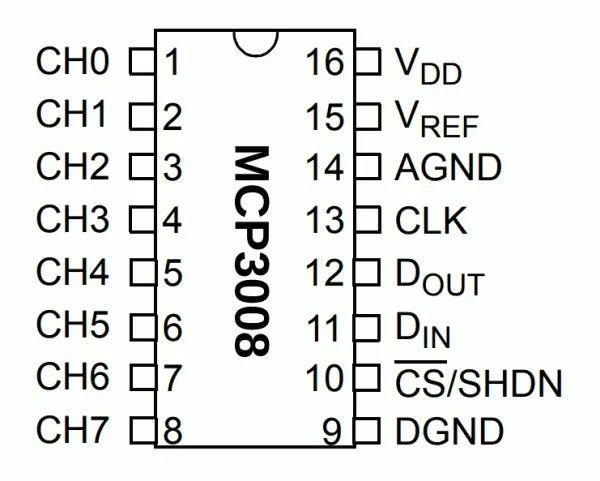
### Présentation du MCP3008
Le **MCP3008** est une petite puce qui permet de convertir jusqu’à **8 signaux analogiques** en valeurs numériques que le Raspberry Pi peut comprendre, via le protocole SPI.
Il se connecte au Raspberry Pi **via la breadboard** pour simplifier les branchements.
### Branchement du MCP3008
[](https://doc.arles-linux.org//uploads/images/gallery/2025-08/sBpIKUcjyfLKBSYb-mcp3008.jpeg)La **puce MCP3008** doit être placée sur le breadboard **à cheval sur la “tranchée centrale”**, de manière à ce que **chaque broche soit positionnée sur une rangée indépendante**, ce qui permet un câblage propre et organisé.
| MCP3008 | Fonction | Branchement sur la breadboard |
| 16 (VDD) | Alimentation | Jumper vers la ligne rouge (3.3V) |
| 15 (VREF) | Référence | Jumper vers la ligne rouge (3,3V) |
| 14 (AGND) | Masse analogique | Jumper vers la ligne noire (GND) |
| 13 (CLK) | Horloge SPI | GPIO11 du Raspberry Pi |
| 12 (DOUT) | Données vers le Raspberry Pi | GPIO9 du Raspberry Pi |
| 11 (DIN) | Données du Raspberry Pi | GPIO10 du Raspberry Pi |
| 10 (CS) | Chip select | GPIO5 du Raspberry Pi |
| 9 (DGND) | Masse numérique | Jumper vers la ligne noire (GND) |
| 1 (CH0) | Canal analogique 0 | Sortie A0 de la sonde |
| Broche | Nom | Rôle / Explication |
| 16 | VDD | Tension d’alimentation **du circuit numérique** (généralement **3,3V ou 5V**). |
| 15 | VREF | Tension de **référence** pour la conversion analogique. **On la relie à VDD**. La précision des mesures dépend de cette valeur. |
| 14 | AGND | **Masse (GND)** pour la partie **analogique** (capteurs). À relier au GND du circuit. |
| 13 | CLK | **Horloge SPI** : le Raspberry Pi envoie un signal ici pour cadencer les échanges de données. |
| 12 | DOUT | **Data OUT** : les **données numériques sortent** du MCP3008 vers le Raspberry Pi. |
| 11 | DIN | **Data IN** : le Raspberry Pi **envoie des commandes vers le MCP3008** (ex : “lis le canal 0”). |
| 10 | CS | **Chip Select** (ou CE = Chip Enable). Sert à dire “je parle maintenant à ce composant SPI”. |
| 9 | DGND | **Masse (GND)** pour la partie **numérique** (Raspberry Pi). À relier au GND. |
| 1 à 8 | CH0 à CH7 | **Canaux analogiques d’entrée** (pour capteurs). Le MCP3008 peut lire **jusqu’à 8 capteurs analogiques**. CH0 est le plus utilisé. |
- 🟥 VDD + VREF = alimentent la puce et définissent la précision.
- 🟦 AGND + DGND = masses nécessaires pour les parties analogiques et numériques.
- 📡 CLK, DOUT, DIN, CS = communication SPI avec le Raspberry Pi.
- 🌱 CH0 à CH7 = brancher ici les capteurs analogiques, comme l’humidité du sol SEN0193.
### Le protocole SPI
C’est un **protocole de communication** utilisé pour faire dialoguer un microcontrôleur (comme le Raspberry Pi) avec des composants externes
C’est un **bus rapide**, synchrone (horloge partagée), **plein-duplex** (on peut envoyer et recevoir en même temps).
Le protocole SPI utilise 4 fils :
| Nom du fil | Fonction | Correspondance sur le Raspberry Pi |
| `MOSI` | Master Out Slave In : le Pi envoie les données vers le capteur | GPIO10 (Pin 19) |
| `MISO` | Master In Slave Out : le Pi lit les données du capteur | GPIO9 (Pin 21) |
| `SCLK` ou `CLK` | Clock : le signal d’horloge synchronise les échanges | GPIO11 (Pin 23) |
| `CS` ou `CE` | Chip Select : active le capteur concerné | Par exemple GPIO5 (Pin 29) |
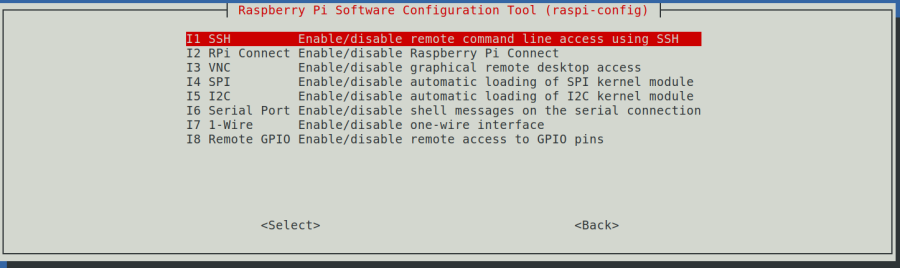
### Activer le protocole SPI
```bash
sudo raspi-config
```
[](https://doc.arles-linux.org//uploads/images/gallery/2025-08/GNHBJyYtVCdf4gfT-interface-option.png)
Aller dans l'interface d'administration du Raspberry Pi :
- Aller dans Interfaces
- Activer SPI
- Redémarrer
### Installation de la bibliothèque
Pour pouvoir installer la bibliothèque, commençons pas entrer dans notre environnement virtuel :
```bash
source meteo/bin/activate
```
Installation de la bibliothèque :
```bash
pip3 install Adafruit_CircuitPython_MCP3xxx
```